Данная статья рассматривает основные принципы построения реле направления мощности на индукционной основе, поэтому статья интересна с точки зрения используемых подходов и ознакомления с принципами реализации устройств РЗА на электромеханической базе. В современных микропроцессорных устройствах идеология определения направления мощности основана на вычисление векторных величин.
В электромеханических устройствах РЗА для контроля направления мощности (прямой, обратной и нулевой последовательности) использовались (используются) реле направления мощности на индукционной основе. Под индукционной основой – понимается принцип взаимодействия двух магнитных потоков, один из которых возникает в одной катушке (или нескольких катушках) от проходящего тока, а другой — в легком диске (или секторе) в результате индуктирования в нем токов.
Реле направления мощности состоит из магнитопровода на котором расположены две обмотки: обмотка напряжения и обмотка тока. Токовая обмотка подключена к керну трансформатора тока, а обмотка напряжения подключена к трансформатору напряжения.
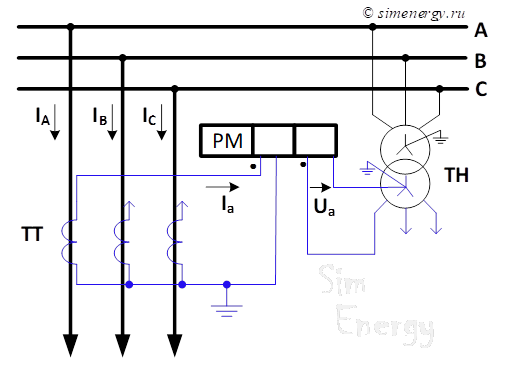
Рис.1. Принципиальная схема включения реле мощности
Конструктивная схема индукционного реле с цилиндрическим ротором показана ниже на рисунке. Как уже было написано, реле направления мощности состоит из магнитопровода (1) на котором расположены обмотки напряжения (2) и обмотка тока (3). В каждой обмотке протекает ток, который создает свой собственный магнитный поток. В токовой обмотке протекает ток ![]() , который создает магнитный поток
, который создает магнитный поток ![]() , а в обмотке напряжения протекает ток
, а в обмотке напряжения протекает ток ![]() , который создает магнитный поток
, который создает магнитный поток ![]() .
.
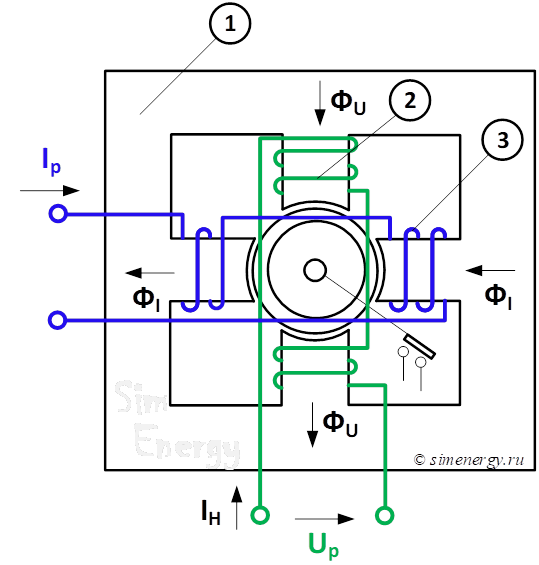
Рис.2. Конструктивная схема индукционного реле с цилиндрическим ротором
Магнитный поток ![]() , создаваемый обмоткой напряжения, и магнитный поток
, создаваемый обмоткой напряжения, и магнитный поток ![]() , создаваемый обмоткой тока, сдвинуты один относительно другого. Сдвиг магнитных потоков является необходимым условием создания вращающегося момента на оси индукционного реле, которое определяется выражением:
, создаваемый обмоткой тока, сдвинуты один относительно другого. Сдвиг магнитных потоков является необходимым условием создания вращающегося момента на оси индукционного реле, которое определяется выражением:
![]()
где угол ![]() – это угол между векторами магнитных потоков
– это угол между векторами магнитных потоков ![]() и
и ![]() .
.
Характеристика срабатывания реле напряжения мощности определяется векторной диаграммой. Построение векторной диаграммы принято начинать с вектора напряжения ![]() в обмотке напряжения реле. При построении векторной диаграммы реле мощности отсчет всех углов производится от вектора напряжения
в обмотке напряжения реле. При построении векторной диаграммы реле мощности отсчет всех углов производится от вектора напряжения ![]() .
.
В обмотке напряжения реле мощности протекает активно-индуктивный ток ![]() . Данный ток
. Данный ток ![]() , протекающий в обмотке напряжения, создает магнитный поток
, протекающий в обмотке напряжения, создает магнитный поток ![]() , который сдвинут на угол
, который сдвинут на угол ![]() от вектора напряжения
от вектора напряжения ![]() . Таким образом, угол
. Таким образом, угол ![]() — угол между векторами напряжения и тока в катушке напряжения (угол внутреннего сдвига), определяемый соотношением активного и реактивного сопротивлений цепи катушки напряжения.
— угол между векторами напряжения и тока в катушке напряжения (угол внутреннего сдвига), определяемый соотношением активного и реактивного сопротивлений цепи катушки напряжения.
В токовой обмотке реле мощности протекает ток ![]() , который создает магнитный поток
, который создает магнитный поток ![]() . Вектор тока
. Вектор тока ![]() может занимать различные положения относительно вектора напряжения
может занимать различные положения относительно вектора напряжения ![]() . Положение вектора
. Положение вектора ![]() определяется углом
определяется углом ![]() .
.
Вдоль вектора ток ![]() проходит линия изменения знака момента, которая характеризует зону срабатывания реле и зону несрабатывания реле (зона заклинивания). Перпендикулярно линия изменения знака момента строится линия максимального момента.
проходит линия изменения знака момента, которая характеризует зону срабатывания реле и зону несрабатывания реле (зона заклинивания). Перпендикулярно линия изменения знака момента строится линия максимального момента.
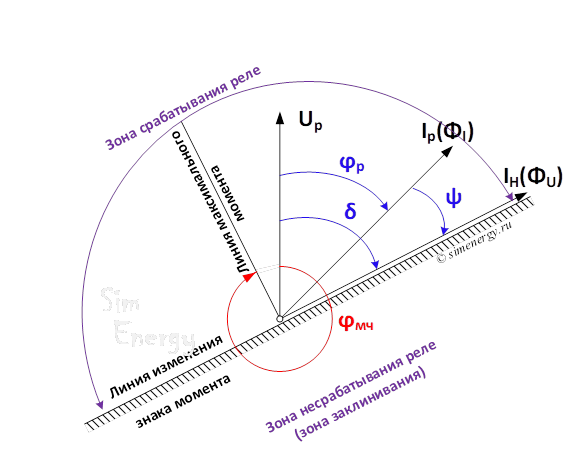
Рис.3. Векторная диаграмма индукционного реле направления мощности
Зависимость вращающего момента подвижной системы реле от тока и напряжения и угла между ними выражается следующим соотношением:
![]()
В данной выражении угол между магнитными потоками можно выразить через выражение внутреннего угла катушки напряжения и угла между подводимого тока и напряжением
![]()
![]()
Конструктивно угол внутреннего сдвига ![]() в реле мощности можно менять в широком диапазоне. Изменяя угол внутреннего сдвига, можно изменять характеристику срабатывания реле. Введем новое понятие – угол максимальной чувствительности
в реле мощности можно менять в широком диапазоне. Изменяя угол внутреннего сдвига, можно изменять характеристику срабатывания реле. Введем новое понятие – угол максимальной чувствительности ![]() который определяется по следующей формуле:
который определяется по следующей формуле:
![]()
![]()
Угол максимальной чувствительности реле направления мощности являются углом между током и напряжением, соответствующий максимальному вращающего моменту в сторону срабатывания реле. Угол максимальной чувствительности откладывают от вектора напряжения к линии максимального момента.
Угол φр между векторами ![]() и
и ![]() , при котором вращающий момент имеет максимальное значение, принято называть углом максимальной чувствительности
, при котором вращающий момент имеет максимальное значение, принято называть углом максимальной чувствительности ![]() . Линия, расположенная к вектору
. Линия, расположенная к вектору ![]() под углом
под углом ![]() , называется линией максимального момента.
, называется линией максимального момента.
Преобразуем полученное выражение для вращающего момента подвижной системы реле используя угол максимальной чувствительности.
![]()
Используем формулы приведения из тригонометрии и преобразуем полученное выражение следующим образом:
![]()
Окончательно получаем, что зависимость вращающего момента подвижной системы реле определяется как функция от тока, напряжения, угла между током и напряжением, а также угла максимальной чувствительности.
Как уже было сказано, что конструктивно угол внутреннего сдвига ![]() в реле мощности можно менять в широком диапазоне. Изменяя величину внутреннего угла реле, можно получить три типа реле мощности, отличающегося характером зависимости рабочего момента
в реле мощности можно менять в широком диапазоне. Изменяя величину внутреннего угла реле, можно получить три типа реле мощности, отличающегося характером зависимости рабочего момента ![]() : реле активного типа, реле реактивного типа и реле смешанного типа.
: реле активного типа, реле реактивного типа и реле смешанного типа.
Внутренний угол реле мощности равен 0 градусов
Рассмотрим реле направления мощности, для которого внутренний угол ![]() .
.
Запишем определение вращающего момента реле через выражение внутреннего угла катушки напряжения и углом между подводимым током и напряжением:
![]()
![]()
Таким образом, вращающий момент в реле пропорционален реактивной мощности, подведенной к реле (реле реактивной мощности).
Построим векторную диаграмму индукционного реле направления мощности. Построение векторной диаграммы принято начинать с вектора напряжения ![]() в обмотке напряжения реле. Как видно из построенной векторной диаграммы угол максимальной чувствительности для данного реле равен 90 градусов
в обмотке напряжения реле. Как видно из построенной векторной диаграммы угол максимальной чувствительности для данного реле равен 90 градусов ![]() .
.
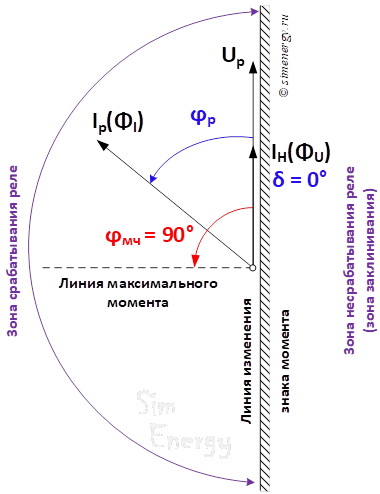
Рис.4. Векторная диаграмма индукционного реле направления мощности при внутреннем угле реле мощности 0 градусов (реле реактивного типа)
В зависимости от схемы подключения токовой обмотки к трансформатору тока реле направления мощности будет реагировать на активно-емкостную нагрузку (направление реактивной мощности к шинам) или активно-индуктивную нагрузку (направление реактивной мощности в линию). Но в данном случае максимальный вращательный момент в реле мощности будет соответствовать режиму, когда по линии передается только реактивная мощность. Устройство будет срабатывать на направление реактивной мощности либо к шинам объекта, либо от шин объекта в зависимости от подключения токовых цепей.
Внутренний угол реле мощности равен 90 градусов
Рассмотрим реле направления мощности, для которого внутренний угол ![]() .
.
Запишем определение вращающего момента реле через выражение внутреннего угла катушки напряжения и углом между подводимым током и напряжением
![]()
![]()
Таким образом, вращающий момент в реле пропорционален активной мощности, подведенной к реле (реле активной мощности).
Построим векторную диаграмму индукционного реле направления мощности. Построение векторной диаграммы принято начинать с вектора напряжения ![]() в обмотке напряжения реле. Как видно из построенной векторной диаграммы угол максимальной чувствительности для данного реле равен 0 градусов
в обмотке напряжения реле. Как видно из построенной векторной диаграммы угол максимальной чувствительности для данного реле равен 0 градусов ![]() .
.
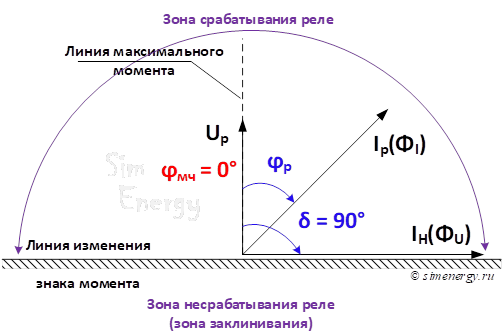
Рис.5. Векторная диаграмма индукционного реле направления мощности при внутреннем угле реле мощности 90 градусов (реле активного типа)
В зависимости от схемы подключения токовой обмотки к трансформатору тока реле направления мощности будет реагировать на активно-емкостную нагрузку (направление реактивной мощности к шинам) или активно-индуктивную нагрузку (направление реактивной мощности в линию). Но в данном случае максимальный вращательный момент в реле мощности будет соответствовать режиму, когда по линии передается только активная мощность. Устройство будет срабатывать на направление активной мощности либо к шинам объекта, либо от шин объекта в зависимости от подключения токовых цепей.
Внутренний угол реле мощности равен значению из диапазона от 0 до 90 градусов
В реле смешанного типа внутренний угол ![]() может иметь значение в диапазоне от 0° до 90°. У отечественных реле смешанного типа внутренний угол
может иметь значение в диапазоне от 0° до 90°. У отечественных реле смешанного типа внутренний угол ![]() изменяется дискретно:
изменяется дискретно: ![]() (
(![]() ) или
) или ![]() (
(![]() ).
).
Рассмотрим реле направления мощности, для которого внутренний угол ![]() .
.
Запишем определение вращающего момента реле через выражение внутреннего угла катушки напряжения и углом между подводимым током и напряжением
![]()
![]()
Построим векторную диаграмму индукционного реле направления мощности. Построение векторной диаграммы принято начинать с вектора напряжения ![]() в обмотке напряжения реле. Как видно из построенной векторной диаграммы угол максимальной чувствительности для данного реле равен 45 градусов
в обмотке напряжения реле. Как видно из построенной векторной диаграммы угол максимальной чувствительности для данного реле равен 45 градусов ![]() .
.
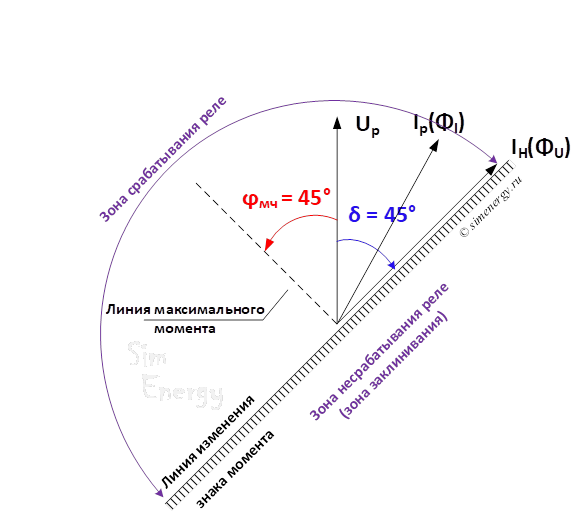
Рис.6. Векторная диаграмма индукционного реле направления мощности при внутреннем угле реле мощности 45 градусов (реле смешанного типа)
В зависимости от схемы подключения токовой обмотки к трансформатору тока реле направления мощности будет реагировать на активно-емкостную нагрузку (направление реактивной мощности к шинам) или активно-индуктивную нагрузку (направление реактивной мощности в линию). Но в данном случае максимальный вращательный момент в реле мощности будет соответствовать режиму, когда вектор тока будет опережать вектор напряжения на угол 45 градусов.
Схемы включения реле направления мощности
Реле направления мощности могут включаться как на фазный ток и фазное напряжение, так и на фазный ток и междуфазное напряжение. Сочетание фаз тока и напряжения реле, называемое его схемой включения. В случае если реле направления мощности используется для устройств релейной защиты, то подключение цепей тока и напряжения должно быть таким, чтобы реле правильно определяло знак мощности короткого замыкания при всех возможных случаях и видах повреждений (токовые защиты, токовые защиты нулевой последовательности, высокочастотная защита и т.д.). В случае если реле направления мощности используется для устройств противоаварийной автоматики, то реле направления мощности должна определять направление мощности в симметричных режимах работы (АЛАР по сопротивлению, АОПН, АОПО и т.д.).
П.1. Схема включения «0-градусная схема»
В данной схеме реле направления мощности подключается на фазные токи и фазные напряжения (Ia и Ua; Ib и Ub; Ic и Uc).
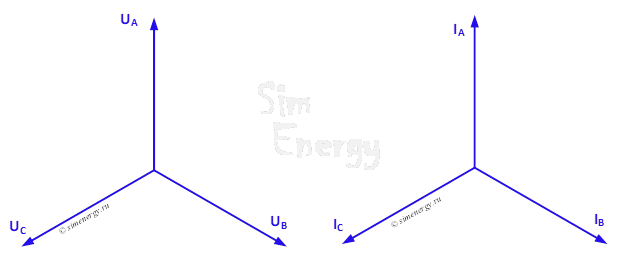
Рис.7. Векторная диаграмма токов и напряжений, подводимых к реле направления мощности при 0-градусной схеме включения
П.2. Схема включения «30-градусная схема»
В данной схеме реле направления мощности подключается на фазные токи и линейные напряжения (Ia и Uac; Ib и Uba; Ic и Ucb).
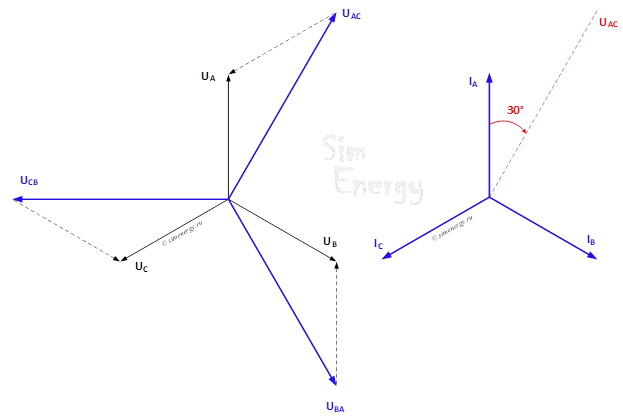
Рис.8. Векторная диаграмма токов и напряжений, подводимых к реле направления мощности при 30-градусной схеме включения
П.3. Схема включения «60-градусная схема с включением на разность фазных токов»
В данной схеме реле направления мощности подключается на разность фазных токов и линейные напряжения (Ia - Ib и Uac; Ib - Ic и Uba; Ic - Ia и Ucb).
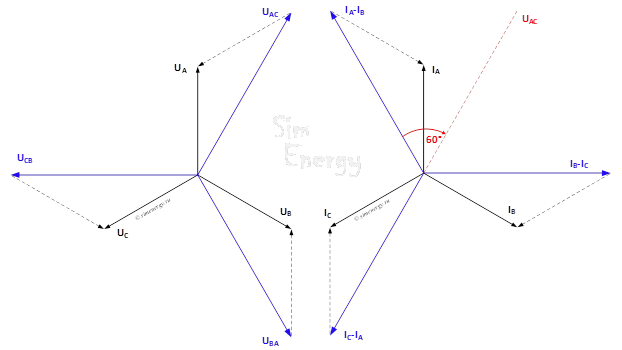
Рис.9. Векторная диаграмма токов и напряжений, подводимых к реле направления мощности при 60-градусной схеме включения с включением на разность фазных токов
П.4. Схема включения «60-градусная схема с включением на фазные токи»
В данной схеме реле направления мощности подключается на фазные токи и фазные напряжения (-Ib и Ua; -Ic и Ub; -Ia и Uc).
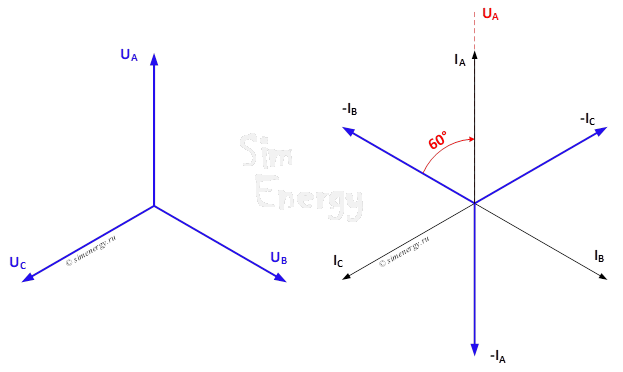
Рис.10. Векторная диаграмма токов и напряжений, подводимых к реле направления мощности при 60-градусной схеме включения с включением на фазные токи
П.5. Схема включения «90-градусная схема»
В данной схеме реле направления мощности подключается на фазные токи и линейные напряжения (Ia и Ubc; Ib и Uca; Ic и Uab).
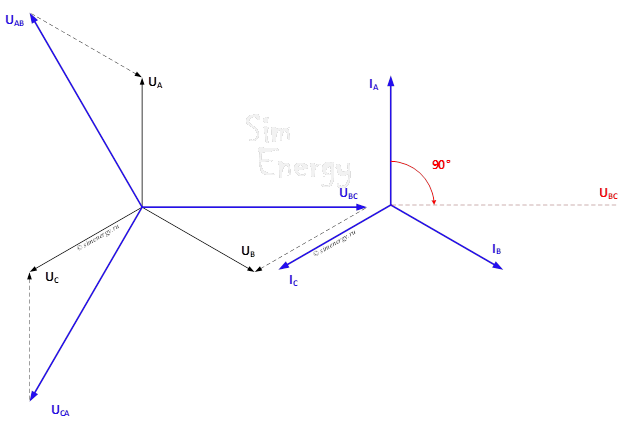
Рис.11. Векторная диаграмма токов и напряжений, подводимых к реле направления мощности при 90-градусной схеме включения
В зависимости от используемых типов реле направления мощности (с разными значениями угла максимальной чувствительности) используются различные схемы подключения токов и напряжений. В части устройств релейной защиты схемы подключения должны обеспечивать правильную фиксацию направления мощности при возникновении короткого замыкания. Наибольшее распространение получили 90- и 30- градусные схемы включения.